This is
Robotics
Where Code Becomes Motion
Learning Robotics from the Ground Up
As a software engineer, my world was long built around code. But I've always been drawn to creating things in the physical world, curious about how logic behaves when it takes form.
This site documents my journey into robotics, where software meets hardware. My goal is to understand how abstract logic translates into physical behaviour, and to share the process, challenges, and lessons learned along the way.
Most of the projects featured here are built on open-source frameworks, reflecting my belief in community-driven innovation and shared learning.
LEKIWI ROVER: HYBRID AGILITY
Three wheels, one arm, and a Raspberry Pi 4
Lekiwi is one of the most mechanically interesting builds in my collection—a three-wheeled rover that combines self-balancing mobility with a functional robotic arm. Built on the LeRobot open-source platform and powered by a Raspberry Pi 4, this project challenged me to manage the coordination between two distinct systems. The technical hurdle was ensuring the rover remained stable and agile while the arm shifted the center of gravity during manipulation tasks.
What makes Lekiwi stand out is its role in "Learning from Demonstration." Because it is fully integrated with the LeRobot framework, I can use teleoperation to record data and train the robot on tasks that require both movement and grasping. Testing its ability to navigate a space while carrying or picking up objects provided a hands-on look at how mobile manipulation works in practice. It's a sophisticated, versatile robot that serves as a bridge between stationary arms and fully autonomous mobile agents.
DOGZILLA-LITE: KINETIC INTELLIGENCE
AI training with Raspberry Pi CM5
Experimenting with the Dogzilla-Lite allowed me to move beyond basic motor control and into the realm of computer vision and AI training. Powered by a Raspberry Pi CM5, this quadruped robot serves as a sophisticated mobile platform for testing neural networks in real-time. The challenge was transitioning from writing explicit movement commands to implementing vision-based logic, where the robot must "see" its environment and decide its own path.
The core of this project involved setting up the AI environment to handle tasks like visual tracking and obstacle recognition. Using the Dogzilla's onboard camera and the processing power of the CM5, I explored how deep learning models can be deployed on the edge to control complex gait patterns. It’s a fascinating intersection of my software roots and robotics future, demonstrating how a machine can move from simply following code to perceiving and reacting to the world around it.
AMAZING HAND: BIOMIMETIC GRIP
3D printing LeRobot's open-source hand
Building the Amazing Hand by Pollen Robotics was a masterclass in biomechanical assembly. After 3D printing the intricate skeletal parts, the real challenge was the "stringing" process; routing the high-strength lines through the fingers and connecting them to the servos with the perfect amount of tension. It required a level of patience and mechanical precision that pushed my assembly skills to a new level.
Once the hardware was calibrated, seeing the hand perform a coordinated grip felt like bridging the gap between abstract code and human anatomy. Because this project is part of the LeRobot ecosystem, it opens the door to much more advanced applications, such as training the hand through teleoperation or even reinforcement learning. It's a beautifully engineered piece of hardware that proves how open-source designs can achieve professional-grade biomimetic movement.
MOCHI-INSPIRED: DIGITAL EMOTION
ESP32 and OLED animation display
This project is a custom desktop companion inspired by the Dasai Mochi design. After 3D printing the shell, I integrated an ESP32 microcontroller and a small OLED display to bring the character to life. The technical challenge was managing the compact internal space to house the wiring and the ESP32 module securely while maintaining the clean, minimalist look of the exterior.
The creative core of this build was the animation workflow. I used Rave.app to design custom character animations, which I then converted into Bitmap arrays. These frame-by-frame assets were uploaded via the Arduino IDE, allowing the ESP32 to render smooth digital expressions on the OLED screen. It's a rewarding project that combines creative motion design with embedded programming, turning a static 3D print into a reactive, personality-filled desk mate.
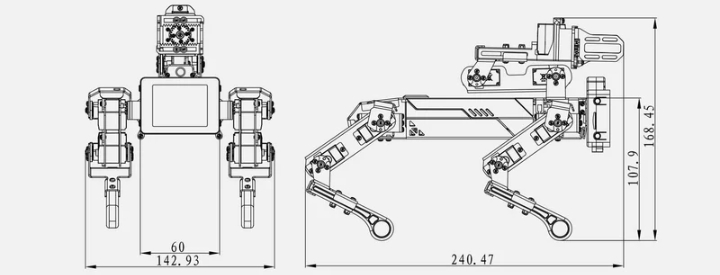
ANIMATRONIC EYES: SIX-SERVO EXPRESSION
3D printed mechanical eyes with Arduino
Following an open-source design, I 3D printed and built this six-servo motorised animatronic eye mechanism. The most time-consuming part was managing the dense wiring and the meticulous calibration required for each joint. I had to dive deep into the code to understand the specific angles needed for each servo to ensure the eyes moved in sync without hitting the mechanical limits of the frame.
The real breakthrough in making the eyes feel "alive" was discovering the ServoEasing library. It was the key to moving beyond jerky, robotic steps and achieving the smooth, fluid motions that give the eyes their personality. By scripting different sequences and commands in the Arduino IDE, I can create lifelike blinking and tracking behaviors. It's a fun, eye-catching project that demonstrates how the right software library can completely transform the feel of physical hardware.
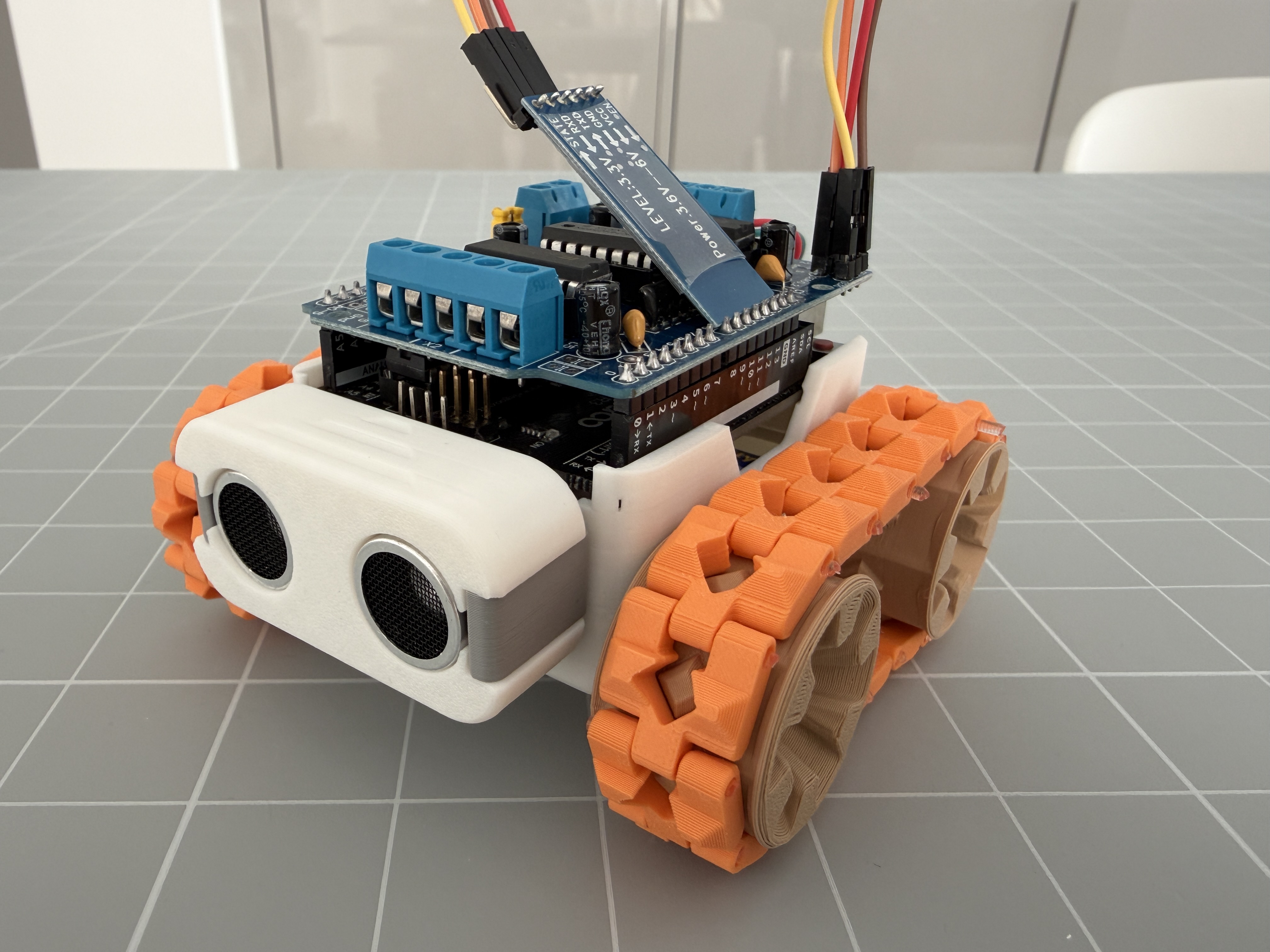
SMARS ROBOT: MODULAR ROVER
Combining manual navigation with ultrasonic avoidance
SMARS is a "Screwless Modular Automated Robot System," and its strength lies in its simplicity and ability to evolve. Because the design is open-source, I could 3D print different chassis parts and swap them out depending on the goal. For this build, I used an Arduino-powered setup, writing and uploading the control logic through the Arduino IDE to manage the motor drivers and sensors within its compact frame.
I equipped the front with an ultrasonic sensor, allowing the car to detect obstacles and automatically change direction when a wall or object was in its path. To add another layer of control, I integrated a wireless module so I could manually navigate the car via a mobile app. It serves as a straightforward, practical testbed for combining manual remote control with basic autonomous obstacle avoidance using simple, interchangeable hardware.
SO-ARM 101: PRINTED PRECISION
Building and teleoperating my first robotic arm
My transition into robotics started with the hum of a 3D printer. Printing and assembling the So-arm 101 gave me a literal feel for physical tolerances; even a millimetre of difference meant a part wouldn't fit, requiring me to troubleshoot and modify until the joints moved smoothly. The real challenge lay in the calibration; I spent time on the terminal configuring the servo motors and running the code to set up the leader and follower arms. The moment the follower arm finally mirrored the leader arm with precision, I felt a massive sense of achievement.
What excites me most about this project is its potential for growth within the Hugging Face open-source community. It's not just a static robot arm; it's a platform for AI training and future integration. Whether I combine it with the Amazing Hand for better grip, mount it on the LeKiwi rover for mobility, or explore remote control through VR, this project is my foundation for a future where code and complex mechanical systems work as one.
Thanks! OK, Bye!